研究内容の紹介 <横浜国立大学 大学院 環境情報研究院 後藤研究室>
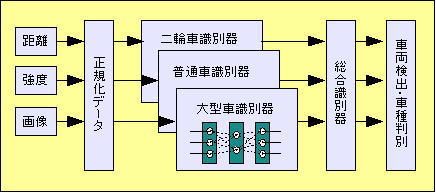
| [車載センサを用いた前方車両認識] 近年、ITS技術研究の一環として、走行支援システムへの応用を目指した前方車両の検出の開発が行なわれ、一部は実用化も進んでいます。これらの方法は、ミリ波やレーザレーダ(LR)などの距離計測センサと単眼・ステレオカメラを組合せることにより、前方車両や障害物の存在を検知しますが、車種の識別機能に関する研究はほとんどありません。 本研究では、車載カメラやセンサからの道路情報をもとに、多重構造ニューラルネットワークを用いて、複数の車両を検出するとともに、車種(大型車、普通車、二輪車とその他障害物)を判別する車両認識手法を開発しています。 |